Blower-Motorn Widerstand erklärt: Symptome, Test, Austausch und Fehlersuche
Jun 18
Ansichten: 314
Integrierte schaltkreise (ICS)
Schnittstelle - Sensor, kapazitive BerührungSpezialisierte ICSPMIC-Spannungsregler-besonderer ZweckPMIC-Spannungsregler-lineare ReglerPMIC-Spannungsregler-linear + SwitchingPMIC-Spannungsregler-linearPMIC-Spannungsregler-DC DC Switching RegulatorsPMIC-Regler-DC-DC-Switching-ControllerPMIC-Spannungs-ReferenzPMIC-v/f und f/v-WandlerPMIC-Thermal ManagementPMIC-SupervisorPMIC-RMS bis DC-WandlerPMIC-Netzteil-Controller, MonitorePMIC-Power over Ethernet (PoE) ControllerPMIC-Power Management-spezialisiertePMIC-Netzschalter, Treiber ladenPMIC-PFC (Power Factor Correction)PMIC oder Steuerungen, ideale DiodenPMIC-Motor-Treiber, ReglerPMIC-Beleuchtung, Ballast-ReglerPMIC-LED-TreiberPMIC-Laser-TreiberPMIC-Hot-Swap-ControllerPMIC-Gate-TreiberPMIC-voll, Half-Bridge-TreiberPMIC-Energy MessungPMIC-Display-TreiberPMIC-derzeitige Regulierung/ManagementPMIC-Batterie-ManagementPMIC-LadegerätePMIC-AC DC Konverter, Offline SchalterMemory-ControllerMemory-Konfigurations-Proms für FPGAsSpeicher-AkkusErinnerungLogic-universelle Bus-FunktionenLogic-Übersetzer, Level-ShifterLogik-Specialty LogicLogik-Signal-Schalter, Multiplexer, DecoderLogic-Shift-RegisterLogic-Parity Generatoren und CheckersLogic-multivibratorenLogik-LatchesLogik - Tore und Wechselrichter - Multifunktion, konfigurierbarLogik-Tore und WechselrichterLogic-Flip FlopsLogik-FIFOs SpeicherLogik-Zähler, TrennlinienLogik-VergleichsoperatorLogik-Puffer, Treiber, Receiver, TransceiverLinear-Video-VerarbeitungLinear-VergleichsoperatorLinear-analoge Multiplikatoren, TrennwändeLinear-Verstärker-Video Amps und ModuleLinear-Verstärker-Spezial-ZweckLinear - Verstärker - Instrumentierung, OP -Verstärker, PufferverstärkerLinear-Verstärker-AudioInterface-Voice Record und PlaybackSchnittstelle - UARTs (Universal Asynchronous Receivers -Sender)Schnittstelle-TelecomInterface-spezialisierteInterface-Signal TerminatorenInterface-Signal-Puffer, Repeater, SplitterInterface-Serializer, DeserializerSchnittstellen-Sensor und Detektor-InterfacesInterface-ModuleInterface-Modems-ICS und ModuleInterface-e/a-ExpanderInterface-Filter-aktivInterface-Encoder, Decoder, KonverterInterface-Treiber, Receiver, TransceiverInterface-Direct Digital Synthesis (DDS)Interface-ControllerInterface-CodecsSchnittstelle - Analoge Switches, Multiplexer, DemultiplexerSchnittstelle-analoge Schalter-spezieller ZweckEmbedded-System on Chip (SoC)Embedded-PLDs (programmierbare Logik-Vorrichtung)Embedded-MikroprozessorenEmbedded-Mikrocontroller-anwendungsspezifischeEmbedded-MikrocontrollerEingebettet - Mikrocontroller, Mikroprozessor, FPGA -ModuleEingebettet - FPGAs (Feldprogrammiergate -Array) mit MikrocontrollernEmbedded-FPGAs (Field Programmable Gate Array)Embedded-DSP (Digital Signal Processors)Eingebettet - CPLDs (komplexe programmierbare Logikgeräte)Datenerfassung-Touch Screen ControllerDatenerfassung-Digital to Analog Converter (DAC)Datenerfassung-digitale PotentiometerDatenerfassung-analog zu Digital Converters (ADC)Datenerfassung-analoges Frontend (AFE)Datenerfassung-MDE/DACs-spezieller ZweckClock/Timing-Uhren in EchtzeitUhr/Timing - programmierbare Timer und OszillatorenClock/Timing-IC-AkkusTakt/Timing-Delay LinesUhr/Timing - Uhrengeneratoren, PLLS, FrequenzsynthesizerClock/Timing-Clock Puffer, TreiberClock/Timing-anwendungsspezifischeAudio Spezial-ZweckHeißer Hersteller
More categories
Diskrete Halbleiter-Produkte
Aktuelle Regulierung - Dioden, TransistorenTransistoren-besonderer ZweckTransistoren-programmierbare UnijunctionTransistoren-jfetsTransistoren-IGBTs-EinzelTransistoren-IGBTs-ModuleTransistoren-IGBTs-ArraysTransistoren-FETs, MOSFETs-EinzelTransistoren-FETs, MOSFETs-RFTransistoren-FETs, MOSFETs-ArraysTransistoren-Bipolar (BJT)-einzeln, Pre-biasedTransistoren-Bipolar (BJT)-EinzelTransistoren-Bipolar (BJT)-RFTransistoren-bipolare (BJT)-Arrays, Pre-biasedTransistoren-bipolare (BJT)-ArraysThyristor-triacsThyristoren-SCRs-ModuleThyristoren-SCRsThyristoren-diacs, sidacsPower Driver ModuleDioden-zenerdioden-EinzelDioden-zenerdioden-ArraysDioden - variable Kapazität (Varik, Varaktoren)Dioden-RFDioden-Gleichrichter-EinzelDioden-Gleichrichter-ArraysDioden-Brücke-GleichrichterHeißer Hersteller
More categories
Kondensatoren
Trimmer, Variable KondensatorenDünne Folien-KondensatorenTantal-KondensatorenTantal-Polymer-KondensatorenSilizium-KondensatorenNiob Oxide KondensatorenMica und PTFE KondensatorenFolien-KondensatorenElektrische Doppelschichtkondensatoren (EDLC), SuperkondensatorenKeramische KondensatorenKondensatoren-Netzwerke, ArraysAluminium-ElektrolytkondensatorenAluminium-Polymer-KondensatorenHeißer Hersteller
More categories
Circuit Protection
Fernseher - Surge Protection Devices (SPDS)TVS-Varistor, movsTVS-ThyristorenTVS-gemischte TechnologieTVS-DiodenTemperaturabschaltungen (Thermische Sicherungen)Überspannungsschutz-ICSPTC-Rückstellende SicherungenBeleuchtung SchutzInrush aktuelle Limiter (ICL)Ground Fault Circuit interrupter (PRCD)Gas Entladung Tube Arresters (GDT)SicherungenSicherungshalterElektrische, Spezial-SicherungenLeistungsschalterHeißer Hersteller
More categories
Isolatoren
Besonderer ZweckOptoisolatoren-Triac, SCR-AusgangOptoisolatoren-Transistor, Photovoltaik-AusgangOptoisolatoren-Logik-AusgangIsolatoren-Gate DriversDigitale IsolatorenHeißer Hersteller
More categories
RF/if und RFID
SIM -Karten für Abonnenten -Identifikationsmodul (SIM)RF -Zirkulatoren und IsolatorenRFID, RF-Zugang, Monitoring-ICSRFID Transponder, TagsRFID LesegeräteRFID -Bewertungs- und Entwicklungskits, BoardsRFID AntennenRFI und EMI - Abschirm- und AbsorbungsmaterialienHF und EMI-Kontakte, Fingerstock und DichtungenRF TransmitterRF Transceiver ModuleRF-Transceiver ICSHF-SchalterRF ShieldsHF-ReceiverHF -Empfänger, Sender und Transceiver -EinheitenRF Power Divider/SplitterRF Power Controller ICsHF-ModulatorenHF-MixerRF misc ICS und ModuleHF-Front-End (LNA + PA)RF -Bewertungs- und Entwicklungskits, BoardsHF-gerichtete KupplungRF DiplexerRF-DetektorenRF-DemodulatorenHF-AntennenHF-VerstärkerBalunDämpfungsgliederHeißer Hersteller
More categories
Filter
SAW-FilterRF-FilterPower Line Filter ModuleMonolithic KristalleHelix-FilterFerrit-Scheiben und PlattenFerrit-Kerne-Kabel und VerkabelungFerrit-Perlen und ChipsFutter durch KondensatorenEMI/HF-Filter (LC, RC Networks)DSL-FilterCommon Mode ChokesKeramische FilterHeißer Hersteller
More categories
Sensoren, Wandler
Ultraschallempfänger, Sender - IndustrialTemperatursensoren - Thermostate - Mechanisch - IndustriellesTemperatursensoren - Analog und digitaler Ausgang - IndustrialNäherungssensoren - IndustrialDrucksensoren, Wandler - IndustrieOptische Sensoren - Photonik - Zähler, Detektoren, SPCM (Einzelphotonzählmodul)Optische Sensoren - KameramoduleMagnetsensoren - Position, Nähe, Geschwindigkeit (Module) - IndustrieKraftsensoren - IndustrialFlusssensoren - IndustriellesFloat, Level Sensoren - IndustrialEncoder - IndustrialFarbsensoren - IndustrialBerührungssensorenUltraschall-Receiver, TransmitterTemperatursensoren-Thermostat-Solid StateTemperatursensoren-Thermostate-mechanischTemperatursensoren - Thermoelemente, TemperatursondenTemperatursensoren - RTD (Widerstandstemperaturdetektor)Temperatursensoren-PTC-ThermistorenTemperatursensoren-ntc-thermistorenTemperatursensoren-Analog und Digital OutputDMSSpezialisierte SensorenSolarzellenSchock-SensorenSensor-Interface-Junction-BlöckeSensor-Kabel-BaugruppenProximity/Belegung Sensoren-fertige EinheitenNäherungsschalterDrucksensoren, WandlerPositionssensoren - Winkel, lineare PositionsmessungOptische Sensoren-reflektierende-Logik-AusgangOptische Sensoren - reflektierend - analoge AusgangOptische Sensoren-PhototransistorenOptische Sensoren - Photointerrupter - Schlitztyp - TransistorausgangOptische Sensoren - Photointerrupter - Schlitztyp - LogikausgabeOptische Sensoren-Lichtschranke, IndustrialOptische Sensoren-PhotodiodenOptische Sensoren-Foto-Detektoren-Remote ReceiverOptische Sensoren-Foto-Detektoren-Logik-AusgangOptische Sensoren-Foto-Detektoren-CDs-ZellenOptische Sensoren-Distanz-MessungOptische Sensoren-Ambient Light, IR, UV SensorenMultifunktionsMotion Sensors-VibrationMotion Sensors-Tilt SchalterBewegungsmelder-optischMotion Sensors-NeigungssensorenMotion Sensors-Imus (Trägheit-Maßeinheiten)Motion Sensors-KreiselMotion Sensors-BeschleunigungsmesserMagnete-Sensor abgestimmtMagnete-Multi PurposeMagnetische Sensoren-Schalter (Solid State)Magnetsensoren - Position, Nähe, Geschwindigkeit (Module)Magnetische Sensoren-linear, Kompass (ICS)Magnetsensoren - Kompass, Magnetfeld (Module)LVDT -Wandler (linearer variabler Differentialtransformator)IrDA Transceiver-ModuleBildsensor, KameraFeuchtigkeit-SensorenGas-SensorenForce SensorenDurchfluss-SensorenFloat, Level SensorenEncoderStaub-SensorenAktuelle WandlerColor SensorenVerstärkerHeißer Hersteller
More categories
Relais
SicherheitsrelaisReedrelaisHochfrequenz (RF) -RelaisSchütze (Festkörper)Schütze (elektromechanisch)Kfz-RelaisSolid State RelaisSignal-Relais, bis zu 2 AmpereRelay-SocketsPower Relays, über 2 AmpereE / A-RelaismoduleI/o-Relay-Modul-RacksHeißer Hersteller
More categories
Transformatoren
Switching-Konverter, SMPS TransformatorenSpecialty TransformatorenPulse TransformatorenPower TransformatorenIsolationstransformatoren und Autotransformatoren, steigern, zurücktretenAktuelle Sense TransformatorenAudio TransformatorenHeißer Hersteller
More categories
Widerstände
Durch Loch-WiderständeSpezialisierte WiderständeWiderstands-Netzwerke, ArraysChip Widerstand-Surface MountChassis Mount WiderständeHeißer Hersteller
More categories
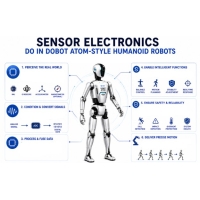
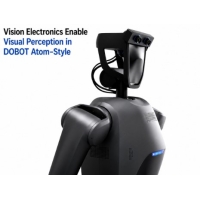
Humanoide Roboter wie der DOBOT Atom sind auf Vision Electronics angewiesen, um visuelle Informationen aus ihrer Umgebung zu erfassen, zu verarbeiten, zu analysieren und zu interpretieren. Während die spezifische Hardware in verschiedenen Robotern variieren kann, ist die zugrunde liegende Vision-Architektur oft ähnlich. Dieser Artikel erklärt, wie Kamerasensoren, Bildsignalverarbeitungselektronik, Mikrocontroller, SoCs, KI-Prozessoren, Kommunikationsschnittstellen und Feedback- Regelungssysteme zusammenarbeiten, um die visuelle Wahrnehmung und den Echtzeitbetrieb von Robotern zu unterstützen. Die im Artikel vorgestellten IC-Modelle sind praktische Beispiele für Komponenten, die häufig in ähnlichen Anwendungen der Vision Electronics verwendet werden.

Abbildung 1. Vision Electronics ermöglichen Wahrnehmung in DOBOT Atom-Style humanoiden Robotern
Vision Electronics in humanoiden Robotern im DOBOT Atom-Stil folgt einer Signalkette der Bildaufnahme, Verarbeitung, KI-Inferenz, Datenübertragung und Steuerungsfeedback. Der Prozess beginnt, wenn Kamerasensoren Licht und visuelle Informationen aus der Umgebung erfassen. Die Signalverarbeitungselektronik konvertiert dann den Sensorausgang in digitale Bilddaten und verbessert die Bildqualität durch Filter- und Verbesserungsfunktionen. Mikrocontroller und SoCs steuern den Fluss von visuellen Daten und verteilen sie an die KI-Verarbeitungshardware. KI-Prozessoren analysieren die Bilder, um Objekte zu identifizieren, Gesichter und Gesten zu erkennen, Tiefe und Bewegung zu schätzen und die Umgebung zu verstehen. Die resultierenden Informationen werden an das Robotersteuerungssystem gesendet, das Navigation, Hindernisvermeidung, Interaktion und Bewegung in Echtzeit anpasst.

Abbildung 2. Von Kamerazufluss zu Roboteraktion
Kamerasensoren sind die primäre Quelle visueller Informationen in DOBOT Atom-ähnlichen humanoiden Robotern. Öffentlich verfügbare Informationen deuten darauf hin, dass das Vision-System mehrere Kameratechnologien integrieren könnte, einschließlich Full HD Binokular-Kameras, RGB-Kameras, RGB-D-Kameras und Tiefensensor-Module wie das Intel RealSense D455. Als zentraler Bestandteil der Vision-Elektronik im DOBOT Atom-Style verwenden Binokular-Kameras doppelte synchronisierte Bildsensoren, um Tiefenwahrnehmung und Objekterkennung durch stereoskopisches Sehen zu unterstützen, was die Funktionalität ermöglicht, die typischerweise mit einem Binokular-Vision-Roboter assoziiert wird. RGB-D-Kameras kombinieren Farbabbildung mit Tiefenmessung, um dreidimensionale Umweltdaten zu erzeugen, was sie für einen RGB-D-Kameraroboter geeignet macht, während dedizierte Tiefensensor-Module die Distanzmessfähigkeiten unterstützen, die in einem Tiefenkameraroboter erforderlich sind. Gemeinsam erfassen diese Vision-Elektronik visuelle Informationen für Objekterkennung, Navigation, Hindernisvermeidung, Umweltkartierung und Mensch-Roboter-Interaktion Aufgaben.
| Vision Phase |
Was passiert |
Beispiel Geräte / Schnittstellen |
| Bild erfassen |
Wandelt Licht in Bilddaten um |
Sony IMX415, Sony IMX577, onsemi AR0234 |
| Tiefen wahrnehmen |
Misst Entfernung oder erzeugt Tiefenkarten |
Intel RealSense D455, VL53L5CX |
| Kamera Schnittstelle |
Sendet Bilddaten an Prozessor |
MIPI CSI-2, USB 3.1, Ethernet |
| Bildsignal Verarbeitung |
Reduziert Rauschen, korrigiert Belichtung, bereitet Bildrahmen vor |
i.MX 8M Plus ISP, RP1 Kamera-Frontend |
| KI Inferenz |
Erkennt Objekte, Gesten, Personen und Szenelemente |
Jetson Orin NX, Jetson Xavier NX, RZ/V2H, Hailo-8 |
| Steuerung Ausgabe |
Sendet Koordinaten oder Entscheidungen an den Robotercontroller |
MCU, SoC, Ethernet, CAN, Bewegungssteuerung |

Abbildung 3. RGB, Binokular, RGB-D, ToF und LiDAR
Kameras und Tiefensensoren liefern die ersten visuellen Eingaben für DOBOT Atom-ähnliche humanoide Roboter. RGB-Sensoren erfassen Farbbilder, Binokular-Kameras schätzen die Tiefe aus zwei Blickwinkeln, RGB-D-Kameras liefern Farb- und Distanzdaten, und ToF- oder LiDAR-Sensoren messen den Objektabstand durch reflektiertes Licht. Diese Geräte liefern nur Bildrahmen, Tiefenkarten oder Entfernungswerte. ISP, KI-Verarbeitung und Robotersteuerungsentscheidungen werden in den folgenden Abschnitten behandelt.
| Sensortyp |
Beispielmodell |
Hersteller |
Nutzung der Vision |
| RGB-Bildsensor |
Sony IMX415 |
Sony |
Hochauflösende Bildaufnahme |
| RGB-Bildsensor |
Sony IMX577 |
Sony |
Eingebettete Vision-Kameramodule |
| Global Shutter Sensor |
AR0234CS |
onsemi |
Aufnahme von bewegten Objekten mit weniger Verzerrung |
| RGB-D Kamera-Modul |
Intel RealSense D455 |
Intel |
Tiefenwahrnehmung und Objekterkennung |
| Multi-Zonen ToF-Sensor |
VL53L5CX |
STMicroelectronics |
Kurzstrecken-Tiefen-Zonenerkennung |
| ToF-Abstandssensor |
 VL53L1X
ST
1141
In Stock: 16437 pcs
VL53L1X
ST
1141
In Stock: 16437 pcs
|
STMicroelectronics |
Nähe und Kollisionserkennung |
| LiDAR-Modul |
TFMini-S |
Benewake |
Kompakte Tiefensensorik |
| 2D LiDAR-Modul |
RPLIDAR A1 / A2 |
Slamtec |
Kartierung und breitere Hindernisüberprüfung |
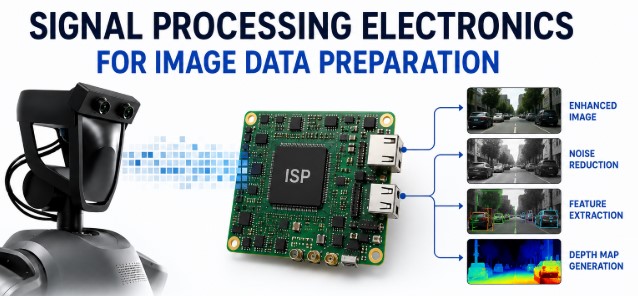
Abbildung 4. ISP und Vision SoCs für die Verarbeitung von Kameradaten
ISP (Bildsignalprozessor) und Vision SoC (System-on-Chip) Geräte verarbeiten Rohbilddaten, die von Kamerasensoren erfasst werden, bevor sie von Computer Vision und KI-Algorithmen genutzt werden. Diese Geräte führen Funktionen wie Rauschunterdrückung, Belichtungssteuerung, Farbkorrektur, Weißabgleich, HDR-Verarbeitung, Bildverbesserung, Bildskalierung und Videoformatierung durch. Vision SoCs verwalten auch Kamera-Schnittstellen, koordinieren den Datenfluss, führen Vision-Algorithmen aus und unterstützen KI-Inferenzaufgaben wie Objekterkennung, Gesichtserkennung, Gestenverfolgung, Tiefenschätzung und Szenenverständnis. In humanoiden Robotern helfen ISP- und Vision-SoC-Geräte, die Rohsensorausgabe in verwendbare visuelle Informationen für Navigation, Umweltbewusstsein, Hindernisvermeidung und Mensch-Roboter-Interaktion umzuwandeln.
| Modell |
Hersteller |
Korrekte Position |
Verarbeitungsrolle |
| i.MX 8M Plus |
NXP |
Vision SoC mit dualem ISP und NPU |
Kameraeingang, ISP-Verarbeitung, Bildskalierung und eingebettete Vision-Inferenz |
| RP1 |
Raspberry Pi |
Raspberry Pi 5 / CM5 I/O Controller |
CSI-2 Kameraeingang, Bilddaten Verarbeitung und ISP-Vorverarbeitungsfunktionen |
| CV1800B |
CVITEK |
Edge Vision SoC / ISP-Plattform |
Kostengünstige Kameraverarbeitung und eingebettete Vision-Anwendungen |
| Ambarella CV22 |
Ambarella |
Vision SoC mit ISP und KI-Vision Beschleunigung |
Videobearbeitung, Kamerabild Verarbeitung und eingebettete Vision-Arbeitslasten |
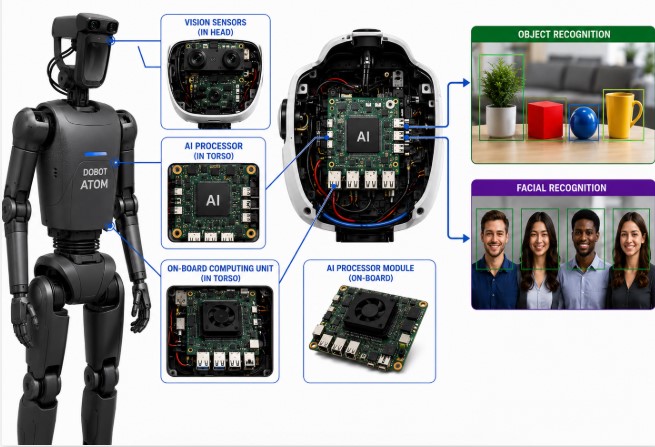
Abbildung 5. KI-Prozessoren für visuelle und Gestenerkennung sowie Szenenverständnis
KI-Prozessoren bieten die Rechenleistung, die für visuelle Wahrnehmung und Entscheidungsfindung in humanoiden Robotern im Stil von DOBOT Atom erforderlich ist. Basierend auf öffentlich verfügbaren Informationen unterstützen diese Systeme die Vision-Language-Action (VLA) Technologie, die visuelle Wahrnehmung, Sprachverständnis und Aktionsgenerierung innerhalb eines einheitlichen KI-Rahmens kombiniert. Nachdem Kameras, RGB-D-Sensoren und LiDAR Umweltdaten gesammelt haben, führen KI-Prozessoren Computer Vision-Algorithmen zur Objekterkennung, Gesichtserkennung, Gestenerkennung, Tiefenschätzung, Szenenverständnis, Körperhaltungsverfolgung, Handbewegungsanalyse und Obstacle Awareness aus. Gestenerkennung ermöglicht es dem Roboter, Handsignale, Zeigrichtungen, Winken und andere menschliche Aktionen für kontaktlose Interaktion und Aufgabenausführung zu identifizieren. Die verarbeiteten Informationen helfen dem Roboter, Objekte zu lokalisieren, Personen zu erkennen, Gesten zu interpretieren, seine Umgebung zu verstehen und Manipulations- sowie Navigationsaufgaben zu unterstützen. Hochleistungs-KI-Computing-Plattformen ermöglichen es diesen Funktionen, in Echtzeit zu arbeiten und autonomes sowie interaktives Roboterverhalten zu unterstützen.
11
Die oben genannten IC-Modelle sind repräsentative Beispiele, die häufig für die KI-Vision-Verarbeitung in robotischen und eingebetteten Vision-Anwendungen verwendet werden.
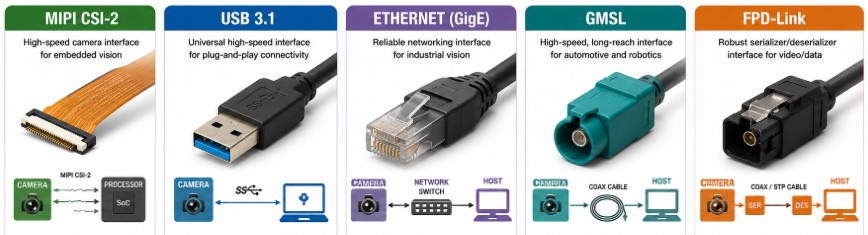
Abbildung 6. MIPI CSI-2, USB 3.1, Ethernet, GMSL und FPD-Link
Vision-Daten-Schnittstellen übertragen Bild- und Sensordaten zwischen Kameras, Prozessoren und Steuerungssystemen innerhalb humanoider Roboter. Nachdem Kamerasensoren visuelle Informationen erfasst haben, transportieren Kommunikationsschnittstellen die Bilddaten zu Mikrocontrollern, Vision-Prozessoren und KI-Computing-Plattformen zur weiteren Analyse. Diese Schnittstellen müssen hohe Datenraten, geringe Latenz und zuverlässige Kommunikation unterstützen, um die Echtzeit-Visualisierung, Navigation, Objekterkennung, Gestenerkennung und Robotersteuerung innerhalb eines Robotervisionssystems zu ermöglichen.
Häufige Beispiele sind MIPI CSI-2 für direkte Hochgeschwindigkeitsverbindungen zwischen Kamera und Prozessor, USB 3.1 für hochbandbreitige Visiokameras und Gigabit-Ethernet für netzwerkbasierte Kamerasysteme. Für Anwendungen, die längere Kabelwege und größere Störsicherheit erfordern, werden GMSL (Gigabit Multimedia Serial Link) und FPD-Link III häufig verwendet, um Video-, Steuerdaten und Synchronisationssignale zwischen verteilten Kameras und Verarbeitungseinheiten zu übertragen. Diese Schnittstellen tragen dazu bei, dass visuelle Daten genau und effizient im gesamten Robotervisionssystem geliefert werden. Die in der nachstehenden Tabelle aufgeführten Schnittstellen-ICs sind repräsentative Beispiele, die in Vision- und Robotikanwendungen verwendet werden.
| Schnittstelle Funktion |
Beispielprodukt |
Hersteller |
Hauptrolle |
| USB 3.1 Schnittstellencontroller |
CYUSB3014-BZXI / EZ-USB FX3 |
Infineon Technologies |
Hochgeschwindigkeits-Bilddatenübertragung zwischen Kamerahardware und Hostprozessoren |
| Gigabit Ethernet PHY |
KSZ9031RNX
N/A
MICRCOHIP QFN48
In Stock: 113 pcs
|
Microchip Technology |
10/100/1000 Mbps Ethernet PHY für vernetzte Sichtsysteme |
| GMSL Serializer |
MAX9295A |
Analog Devices |
Langstreckenübertragung von Kameravideo |
| GMSL Deserializer |
MAX9296A |
Analog Devices |
Empfängt seriell übertragene Kameravideodaten |
| FPD-Link III Serializer |
DS90UB953-Q1
TEXAS INSTRUMENTS
583
In Stock: 32450 pcs
|
Texas Instruments |
Kamera-Serializer für die Hochgeschwindigkeits-Bilddatenübertragung |
| FPD-Link III Deserializer |
DS90UB954-Q1
TEXAS INSTRUMENTS
583
In Stock: 32550 pcs
|
Texas Instruments |
Empfängt und aggregiert hochgeschwindigkeits Kamera-Daten |
| Drahtloser Controller |
ESP32
ESP
In Stock: 23322 pcs
|
Espressif Systems |
Niedrigere drahtlose Konfiguration, Überwachung oder Hilfsdatenübertragung |
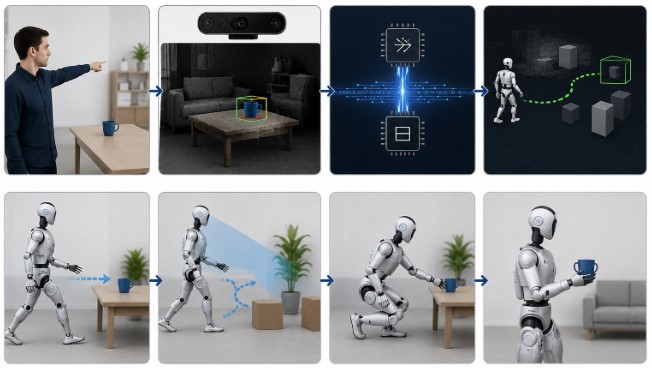
Abbildung 7. Vision-zu-Aktion Steuerfluss in humanoiden Robotern
Nachdem Kameras, Tiefensensoren und KI-Prozessoren Objekte, Hindernisse, Gesten oder Bewegungen in der Umgebung identifiziert haben, müssen die resultierenden Steuerinformationen an das Bewegungssystem des Roboters zur physischen Aktion übermittelt werden. Die Kommunikationselektronik bietet den Weg für die Übertragung von Daten zwischen Bildverarbeitungsprozessoren, Systemcontrollern, Sensoren und Aktuator-Subsystemen. Als ein wichtiger Teil der Elektronik für die Sicht von humanoiden Robotern übertragen diese Geräte Objektkoordinaten, Zielpositionen, Hindernisstandorte, Bewegungsbahnen und Navigationsbefehle, die aus der visuellen Analyse generiert werden, und ermöglichen damit Echtzeitreaktionen auf sich ändernde Umweltbedingungen.
Für hochbandbreitige Kameradaten kann die Visionsebene je nach Kameraposition, Kabellänge, Geräuschpegel und Verarbeitungsarchitektur USB, Ethernet, GMSL, FPD-Link oder MIPI CSI-2 verwenden. Niedrigdatenrate-Drahtlosverbindungen können für die Überwachung oder Konfiguration genutzt werden, sollten jedoch nicht als der Hauptweg für Echtzeit-Kamerastreams betrachtet werden.
Wenn beispielsweise eine Person auf ein bestimmtes Objekt zeigt, können die Kameras und KI-Visionsprozessoren des Roboters die Geste erkennen, den Standort des Objekts bestimmen und seine Position in der umgebenden Umgebung berechnen. Die Kommunikationselektronik überträgt dann diese Informationen an den Robotercontroller, der Bewegungsbefehle für die Arme, Hände oder das Fortbewegungssystem generiert. Der Roboter kann anschließend das Ziel ansteuern, Hindernisse auf dem Weg vermeiden und Aktionen wie das Aufnehmen, Inspizieren oder Liefern des Objekts ausführen. Diese Sequenz demonstriert, wie visuelle Wahrnehmung in koordinierte physische Aktionen in Echtzeit umgewandelt wird.
Visionsysteme verlassen sich auf mehrere Arten integrierter Schaltungen, um visuelle Informationen zu erfassen, zu verarbeiten, zu analysieren und zu übertragen. Während die spezifische Hardware, die im DOBOT Atom verwendet wird, nicht öffentlich bekannt gegeben wurde, stellen die folgenden Produkte und Komponenten Beispiele dar, die häufig in ähnlichen robotischen Vision-Architekturen vorkommen und Funktionen ausführen können, die mit denen in einem DOBOT Atom Vision-System vergleichbar sind.
Unsere Website bietet viele der unten aufgeführten Modelle der Visionselektronik, einschließlich Bildsensoren, KI-Visionsprozessoren, Schnittstellen-ICs und Ethernet-PHYs. Sie können uns für Preise, Verfügbarkeit und kompatible Alternativen für Prototypen oder Produktionsanforderungen kontaktieren.
Beispielprodukte und -komponenten der Visionselektronik
| Visionsfunktion |
Beispielprodukt |
Hersteller |
Hauptrolle |
| RGB-Kamerasensor |
Sony IMX415 |
Sony Semiconductor Solutions |
Erfasst hochauflösende Bilddaten für die Objekterkennung und visuelle Wahrnehmung |
| Sony IMX577 |
Sony Semiconductor Solutions |
Hochwertige Bildaufnahme für robotische Visionsysteme |
|
| Global Shutter-Kamerasensor |
AR0234CS |
onsemi |
Bewegungsfreundliche Bildaufnahme mit reduzierter Bewegungsversetzung |
| Tiefensensor (ToF) |
VL53L5CX |
STMicroelectronics |
Abstandsmessung und Tiefenkartenerstellung |
| RGB-D-Kamera |
Intel RealSense D455 |
Intel |
Gleichzeitige Farbbilderfassung und Tiefensensierung |
| Vision SoC / ISP |
i.MX 8M Plus |
NXP Semiconductors |
Bildsignalverarbeitung, eingebettete Vision und KI-Beschleunigung |
| CV1800B |
CVITEK |
Kamera Verarbeitung und eingebettete Visionsanwendungen |
|
| Kamera-Schnittstellencontroller |
RP1 |
Raspberry Pi |
CSI-2-Kameraschnittstelle und Bilddatenverarbeitung |
| Mikrocontroller |
 STM32H743ZIT6
STMicroelectronics
IC MCU 32BIT 2MB FLASH 144LQFP
In Stock: 5338 pcs
STM32H743ZIT6
STMicroelectronics
IC MCU 32BIT 2MB FLASH 144LQFP
In Stock: 5338 pcs
|
STMicroelectronics |
Kamerasteuerung, Sensorsynchronisation und Systemkoordination |
| KI-Visionsprozessor |
Jetson Orin NX 16GB |
NVIDIA |
Echtzeit-KI-Schlussfolgerungen, Objekterkennung und Szenenverständnis |
| Jetson Xavier NX |
NVIDIA |
Eingebettete KI-Vision und Multi-Kamera-Verarbeitung |
|
| RZ/V2H |
Renesas |
KI-basierte Bildverarbeitung mit integrierter DRP-AI-Beschleuniger |
|
| KI-Beschleuniger |
Hailo-8 |
Hailo |
Energieeffiziente Edge-KI-Inferenz für Vision-Workloads |
| Myriad X MA2485 |
Intel |
Beschleunigung der Computer Vision und Verarbeitung neuronaler Netzwerke |
|
| Coral Edge TPU |
Google |
Edge-KI-Beschleunigung für Objekt- und Gestenerkennung |
|
| USB 3.1 Schnittstellencontroller |
CYUSB3014-BZXI (EZ-USB FX3) |
Infineon Technologies |
Hochgeschwindigkeitsbildübertragung zwischen Kameras und Prozessoren |
| Ethernet PHY |
KSZ9031RNX
N/A
MICRCOHIP QFN48
In Stock: 113 pcs
|
Microchip Technology |
Gigabit-Ethernet-Kommunikation für Visionsysteme |
| GMSL Serializer |
MAX9295AFTN/V+ |
Analog Devices |
Übertragung von Kameravideodaten über lange Distanzen |
| FPD-Link III Deserializer |
DS90UB954-Q1
TEXAS INSTRUMENTS
583
In Stock: 32550 pcs
|
Texas Instruments |
Hochgeschwindigkeitsempfang und Verarbeitung von Kameradaten |
| Wireless Communication Controller |
ESP32
ESP
In Stock: 23322 pcs
|
Espressif Systems |
Drahtloser Datenaustausch, Fernüberwachung und Sensornetzwerke |
| GMSL Deserializer |
MAX9296A |
Analog Devices |
Empfängt serialisierte Kameravideodaten von GMSL-Verbindungen |
| FPD-Link III Serializer |
DS90UB953-Q1
TEXAS INSTRUMENTS
583
In Stock: 32450 pcs
|
Texas Instruments |
Überträgt hochgeschwindigkeits Kamerasensordaten über FPD-Link III |
| Tiefensensor (ToF) |
VL53L1X
ST
1141
In Stock: 16437 pcs
|
STMicroelectronics |
Langstrecken-ToF-Distanzmessung zur Objekterkennung und Kollisionsbewusstsein |
| LiDAR-Modul |
TFMini-S |
Benewake |
Kompakte LiDAR-Distanzmessung zur Hinderniserkennung und Unterstützung der Roboternavigation |
| 2D LiDAR-Modul |
RPLIDAR A1 / A2 |
Slamtec |
Flächendeckende Scans, Kartierung und Hinderniserkennung für mobile Robotplattformen |
| Embedded Vision SoC / AI-Prozessor |
RK3588
ROCKCH
867
In Stock: 729 pcs
|
Rockchip |
NPU-basierte eingebettete Bildverarbeitung für kostensensible Robotervisionsplattformen |
Die oben aufgeführten IC-Modelle sind repräsentative Beispiele, die häufig in der Maschinenvision, embedded Vision und Robotikanwendungen verwendet werden. Wenn Sie eine umfassendere Erklärung der Visionselektronik in humanoiden Robotern wünschen, einschließlich Kamerasensoren, AI-Prozessoren, Tiefenmessung und Vision-to-Action-Steuerung, lesen Sie unseren vollständigen Leitfaden zu DOBOT Atom und humanoiden Roboter Elektronik.
STMicroelectronics
IC MCU 32BIT 2MB FLASH 144LQFP
Auf Lager: 5338pcs
N/A
MICRCOHIP QFN48
Auf Lager: 113pcs
TEXAS INSTRUMENTS
583
Auf Lager: 32450pcs
TEXAS INSTRUMENTS
583
Auf Lager: 32550pcs
ESP
Auf Lager: 23322pcs
ROCKCH
867
Auf Lager: 729pcs
ST
1141
Auf Lager: 16437pcs
Visionselektronik ist die Hardwarekette, die Bild- oder Tiefendaten erfasst, Kamerasignale verarbeitet, AI-Vision-Algorithmen ausführt und visuelle Ergebnisse an den Robotercontroller für Navigation, Objekterkennung, Gestenerkennung oder Manipulation sendet.
RGB-D- und Tiefenkameras liefern sowohl Farbbilder als auch Entfernungsinformationen. Dies hilft humanoiden Robotern, die Position von Objekten abzuschätzen, Hindernisse zu erkennen, den nahegelegenen Raum zu kartieren und die Hand-Augen-Koordination zu unterstützen.
Ein Bildsensor erfasst Licht, ein ISP bereitet das Bild durch Belichtungskontrolle und Rauschunterdrückung auf, und ein AI-Prozessor führt Erkennungsaufgaben wie Objekterkennung, Gesichtserkennung, Gestenerkennung oder Szenenverständnis aus.
Intel RealSense D455 ist ein Stereo-Tiefenkameramodul, kein einzelner IC. Es liefert RGB- und Tiefendaten über eine USB-Schnittstelle und kann als RGB-D-Sensing-Beispiel in robotischen Sichtsystemen verwendet werden.
Der Visionprozessor gibt Informationen wie Objektkoordinaten, Tiefenkarten, Verfolgungsergebnisse oder Gestenlabels aus. Der Robotercontroller wandelt diese Informationen in Bewegungsziele, Navigationsaktualisierungen oder Greifbefehle um, während Motor- und Gelenksteuerungen die Bewegung ausführen.

Jun 23
Ansichten: 25

Jun 22
Ansichten: 152

Jun 18
Ansichten: 1445

Jun 18
Ansichten: 314
Jun 18
Ansichten: 385
Jun 16
Ansichten: 350